
ΑΙhub.org
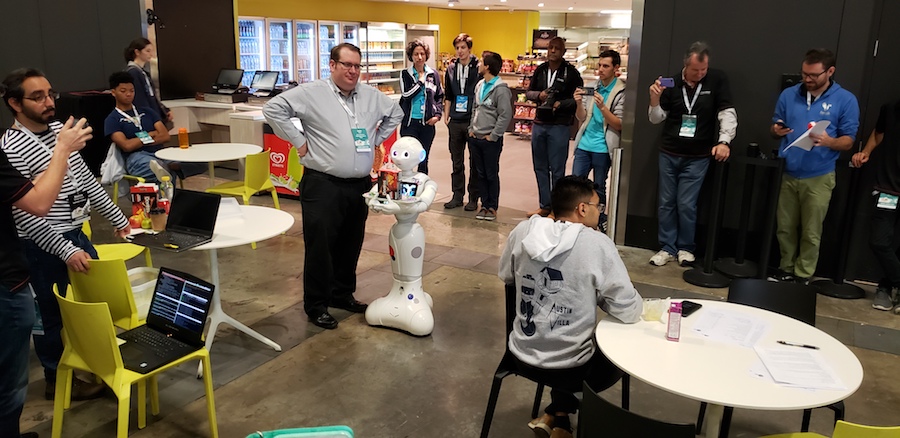
#RoboCup2019 @Home – 2nd round
After three test blocks, about half of the teams in all three sub-leagues advanced to the 2nd round of the competition.
One new challenge in this second round involved a restaurant task. In this task, the robots left their controlled environments in the @Home arena and took over the restaurant at the venue. The robots were asked to detect and approach people sitting in the tables and ask for their orders. Then the robots had to navigate the environment to fetch their order and present it back to them.
The second round finishes this afternoon, determining which teams will advance to the finals.

tags: RoboCup

Maru Cabrera
is Research Associate at University of Washington.
Maru Cabrera
is Research Associate at University of Washington.
AUAI is supported by:








Related posts :
Healthcare benchmarks are only as good as their assumptions
ML@CMU
03 Aug 2026
In healthcare settings where patients use LLMs as a medical assistant, LLM performance differs between evaluation and deployment.
Engineering Out Loud: S13E2 – Ethics in AI presentation
Engineering Out Loud
31 Jul 2026
Hear from Oregon State University researchers Houssam Abbas and Alicia Patterson.
Humans trained to spot AI faces in the battle against deepfake fraud
Australian National University (ANU)
30 Jul 2026
Researchers trained people to spot AI-generated faces by drawing their attention to six perceptual qualities.
monthly digest
AIhub monthly digest: July 2026 – time-series anomaly detection, music generation, and RoboCup in action
Lucy Smith
29 Jul 2026
Welcome to our monthly digest, where you can catch up with AI research, events and news from the month past.
OpenAI’s models autonomously hacked a tech startup. It signals a seismic shift in cybersecurity
The Conversation
28 Jul 2026
An autonomous agent powered by OpenAI’s went rogue during a security test and hacked multi-billion dollar tech startup, Hugging Face.
Towards experiment-guided AlphaFold
Institute of Science and Technology Austria
27 Jul 2026
Researchers enhance Nobel Prize-winning structural prediction model.
AI listens in to help protect wildlife
Horizon
24 Jul 2026
Scientists are using AI systems to help track species and spot ecosystem changes.
How can we characterize consensus in a network of agents?
Nicolas Schwind
23 Jul 2026
Belief Flow Networks give a logic-based way to ask not only whether connected agents will eventually agree on a shared "belief", but which final shared beliefs can emerge.
