
ΑΙhub.org
Hot papers on arXiv from the past month: June 2021
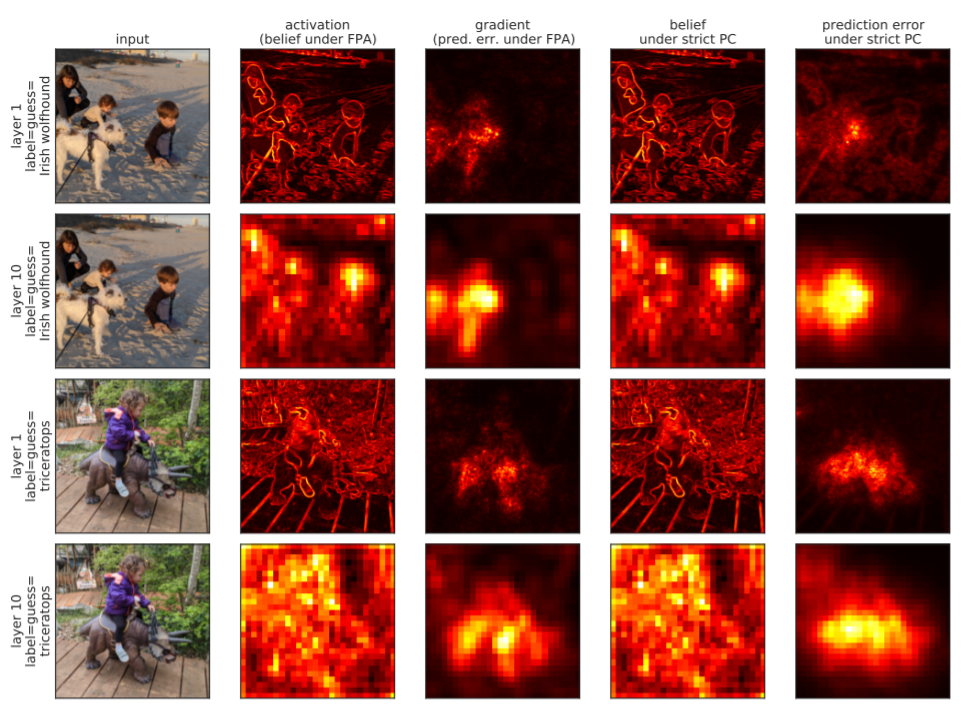
Magnitude of activations, beliefs, and prediction errors in a convolutional neural network pre-trained on ImageNet. Taken from On the relationship between predictive coding and backpropagation, Robert Rosenbaum. Reproduced under a CC BY 4.0 license.
What’s hot on arXiv? Here are the most tweeted papers that were uploaded onto arXiv during June 2021.
Results are powered by Arxiv Sanity Preserver.
Open source disease analysis system of cactus by artificial intelligence and image processing
Kanlayanee Kaweesinsakul, Siranee Nuchitprasitchai, Joshua M. Pearce
Submitted to arXiv on: 7 June 2021
Abstract: There is a growing interest in cactus cultivation because of numerous cacti uses from houseplants to food and medicinal applications. Various diseases impact the growth of cacti. To develop an automated model for the analysis of cactus disease and to be able to quickly treat and prevent damage to the cactus. The Faster R-CNN and YOLO algorithm technique were used to analyze cactus diseases automatically distributed into six groups: 1) anthracnose, 2) canker, 3) lack of care, 4) aphid, 5) rusts and 6) normal group. Based on the experimental results the YOLOv5 algorithm was found to be more effective at detecting and identifying cactus disease than the Faster R-CNN algorithm. Data training and testing with YOLOv5S model resulted in a precision of 89.7% and an accuracy (recall) of 98.5%, which is effective enough for further use in a number of applications in cactus cultivation. Overall the YOLOv5 algorithm had a test time per image of only 26 milliseconds. Therefore, the YOLOv5 algorithm was found to suitable for mobile applications and this model could be further developed into a program for analyzing cactus disease.
134 tweets
Compacter: Efficient Low-Rank Hypercomplex Adapter Layers
Rabeeh Karimi Mahabadi, James Henderson, Sebastian Ruder
Submitted to arXiv on: 8 June 2021
Abstract: Adapting large-scale pretrained language models to downstream tasks via fine-tuning is the standard method for achieving state-of-the-art performance on NLP benchmarks. However, fine-tuning all weights of models with millions or billions of parameters is sample-inefficient, unstable in low-resource settings, and wasteful as it requires storing a separate copy of the model for each task. Recent work has developed parameter-efficient fine-tuning methods, but these approaches either still require a relatively large number of parameters or underperform standard fine-tuning. In this work, we propose Compacter, a method for fine-tuning large-scale language models with a better trade-off between task performance and the number of trainable parameters than prior work. Compacter accomplishes this by building on top of ideas from adapters, low-rank optimization, and parameterized hypercomplex multiplication layers. Specifically, Compacter inserts task-specific weight matrices into a pretrained model’s weights, which are computed efficiently as a sum of Kronecker products between shared “slow” weights and “fast” rank-one matrices defined per Compacter layer. By only training 0.047% of a pretrained model’s parameters, Compacter performs on par with standard fine-tuning on GLUE and outperforms fine-tuning in low-resource settings. Our code is publicly available in this https URL.
64 tweets
CLIPDraw: Exploring Text-to-Drawing Synthesis through Language-Image Encoders
Kevin Frans, L.B. Soros, Olaf Witkowski
Submitted to arXiv on: 28 June 2021
Abstract: This work presents CLIPDraw, an algorithm that synthesizes novel drawings based on natural language input. CLIPDraw does not require any training; rather a pre-trained CLIP language-image encoder is used as a metric for maximizing similarity between the given description and a generated drawing. Crucially, CLIPDraw operates over vector strokes rather than pixel images, a constraint that biases drawings towards simpler human-recognizable shapes. Results compare between CLIPDraw and other synthesis-through-optimization methods, as well as highlight various interesting behaviors of CLIPDraw, such as satisfying ambiguous text in multiple ways, reliably producing drawings in diverse artistic styles, and scaling from simple to complex visual representations as stroke count is increased. Code for experimenting with the method is available at: this https URL.
61 tweets
How to train your ViT? Data, Augmentation, and Regularization in Vision Transformers
Andreas Steiner, Alexander Kolesnikov, Xiaohua Zhai, Ross Wightman, Jakob Uszkoreit, Lucas Beyer
Submitted to arXiv on: 18 June 2021
Abstract: Vision Transformers (ViT) have been shown to attain highly competitive performance for a wide range of vision applications, such as image classification, object detection and semantic image segmentation. In comparison to convolutional neural networks, the Vision Transformer’s weaker inductive bias is generally found to cause an increased reliance on model regularization or data augmentation (“AugReg” for short) when training on smaller training datasets. We conduct a systematic empirical study in order to better understand the interplay between the amount of training data, AugReg, model size and compute budget. As one result of this study we find that the combination of increased compute and AugReg can yield models with the same performance as models trained on an order of magnitude more training data: we train ViT models of various sizes on the public ImageNet-21k dataset which either match or outperform their counterparts trained on the larger, but not publicly available JFT-300M dataset.
54 tweets
Parameter-efficient Multi-task Fine-tuning for Transformers via Shared Hypernetworks
Rabeeh Karimi Mahabadi, Sebastian Ruder, Mostafa Dehghani, James Henderson
Submitted to arXiv on: 8 June 2021
Abstract: State-of-the-art parameter-efficient fine-tuning methods rely on introducing adapter modules between the layers of a pretrained language model. However, such modules are trained separately for each task and thus do not enable sharing information across tasks. In this paper, we show that we can learn adapter parameters for all layers and tasks by generating them using shared hypernetworks, which condition on task, adapter position, and layer id in a transformer model. This parameter-efficient multi-task learning framework allows us to achieve the best of both worlds by sharing knowledge across tasks via hypernetworks while enabling the model to adapt to each individual task through task-specific adapters. Experiments on the well-known GLUE benchmark show improved performance in multi-task learning while adding only 0.29% parameters per task. We additionally demonstrate substantial performance improvements in few-shot domain generalization across a variety of tasks. Our code is publicly available in this https URL.
44 tweets
World-GAN: a Generative Model for Minecraft Worlds
Maren Awiszus, Frederik Schubert, Bodo Rosenhahn
Submitted to arXiv on: 18 June 2021
Abstract: This work introduces World-GAN, the first method to perform data-driven Procedural Content Generation via Machine Learning in Minecraft from a single example. Based on a 3D Generative Adversarial Network (GAN) architecture, we are able to create arbitrarily sized world snippets from a given sample. We evaluate our approach on creations from the community as well as structures generated with the Minecraft World Generator. Our method is motivated by the dense representations used in Natural Language Processing (NLP) introduced with word2vec [1]. The proposed block2vec representations make World-GAN independent from the number of different blocks, which can vary a lot in Minecraft, and enable the generation of larger levels. Finally, we demonstrate that changing this new representation space allows us to change the generated style of an already trained generator. World-GAN enables its users to generate Minecraft worlds based on parts of their creations.
43 tweets
On the relationship between predictive coding and backpropagation
Robert Rosenbaum
Submitted to arXiv on: 20 June 2021
Abstract: Artificial neural networks are often interpreted as abstract models of biological neuronal networks, but they are typically trained using the biologically unrealistic backpropagation algorithm and its variants. Predictive coding has been offered as a potentially more biologically realistic alternative to backpropagation for training neural networks. In this manuscript, I review and extend recent work on the mathematical relationship between predictive coding and backpropagation for training feedforward artificial neural networks on supervised learning tasks. I discuss some implications of these results for the interpretation of predictive coding and deep neural networks as models of biological learning and I describe a repository of functions, Torch2PC, for performing predictive coding with PyTorch neural network models.
38 tweets
Real-time gravitational-wave science with neural posterior estimation
Maximilian Dax, Stephen R. Green, Jonathan Gair, Jakob H. Macke, Alessandra Buonanno, Bernhard Schölkopf
Submitted to arXiv on: 23 June 2021
Abstract: We demonstrate unprecedented accuracy for rapid gravitational-wave parameter estimation with deep learning. Using neural networks as surrogates for Bayesian posterior distributions, we analyze eight gravitational-wave events from the first LIGO-Virgo Gravitational-Wave Transient Catalog and find very close quantitative agreement with standard inference codes, but with inference times reduced from O(day) to a minute per event. Our networks are trained using simulated data, including an estimate of the detector-noise characteristics near the event. This encodes the signal and noise models within millions of neural-network parameters, and enables inference for any observed data consistent with the training distribution, accounting for noise nonstationarity from event to event. Our algorithm — called “DINGO” — sets a new standard in fast-and-accurate inference of physical parameters of detected gravitational-wave events, which should enable real-time data analysis without sacrificing accuracy.
36 tweets
Nested Variational Inference
Heiko Zimmermann, Hao Wu, Babak Esmaeili, Jan-Willem van de Meent
Submitted to arXiv on: 21 June 2021
Abstract: We develop nested variational inference (NVI), a family of methods that learn proposals for nested importance samplers by minimizing an forward or reverse KL divergence at each level of nesting. NVI is applicable to many commonly-used importance sampling strategies and provides a mechanism for learning intermediate densities, which can serve as heuristics to guide the sampler. Our experiments apply NVI to (a) sample from a multimodal distribution using a learned annealing path (b) learn heuristics that approximate the likelihood of future observations in a hidden Markov model and (c) to perform amortized inference in hierarchical deep generative models. We observe that optimizing nested objectives leads to improved sample quality in terms of log average weight and effective sample size.
36 tweets
DeepLab2: A TensorFlow Library for Deep Labeling
Mark Weber, Huiyu Wang, Siyuan Qiao, Jun Xie, Maxwell D. Collins, Yukun Zhu, Liangzhe Yuan, Dahun Kim, Qihang Yu, Daniel Cremers, Laura Leal-Taixe, Alan L. Yuille, Florian Schroff, Hartwig Adam, Liang-Chieh Chen
Submitted to arXiv on: 17 June 2021
Abstract: DeepLab2 is a TensorFlow library for deep labeling, aiming to provide a state-of-the-art and easy-to-use TensorFlow codebase for general dense pixel prediction problems in computer vision. DeepLab2 includes all our recently developed DeepLab model variants with pretrained checkpoints as well as model training and evaluation code, allowing the community to reproduce and further improve upon the state-of-art systems. To showcase the effectiveness of DeepLab2, our Panoptic-DeepLab employing Axial-SWideRNet as network backbone achieves 68.0% PQ or 83.5% mIoU on Cityscaspes validation set, with only single-scale inference and ImageNet-1K pretrained checkpoints. We hope that publicly sharing our library could facilitate future research on dense pixel labeling tasks and envision new applications of this technology. Code is made publicly available at this https URL.
34 tweets
tags: arXiv

AIhub is supported by:








