
ΑΙhub.org
Making sense of vision and touch: #ICRA2019 best paper award video and interview
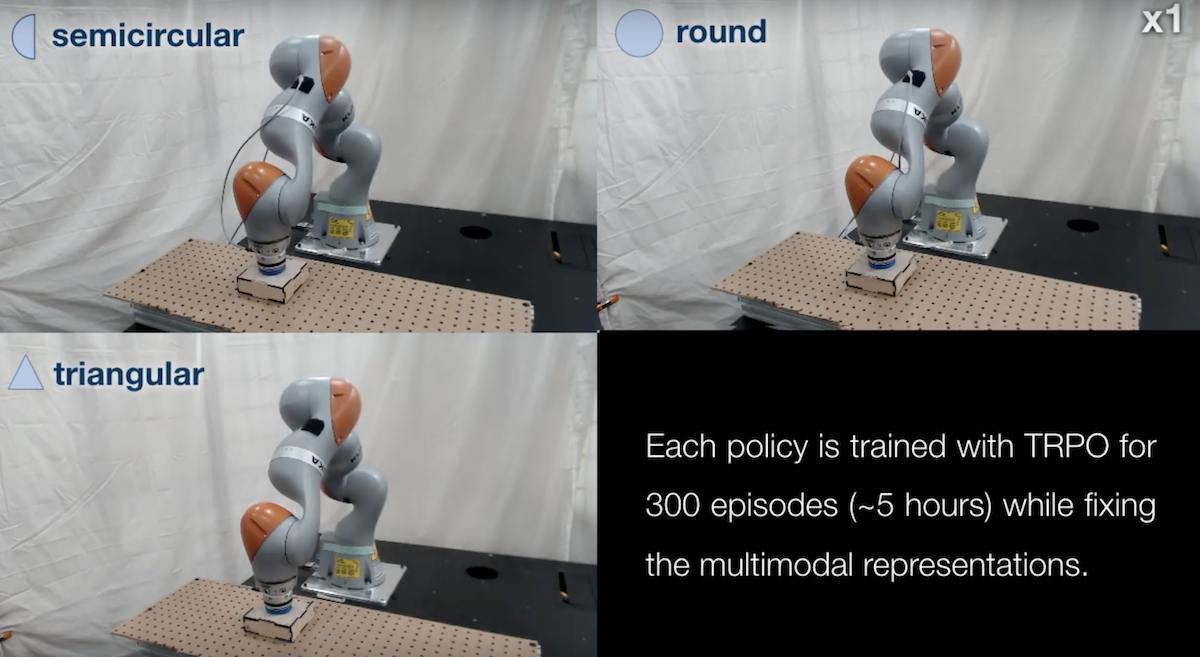
PhD candidate Michelle A. Lee from the Stanford AI Lab won the best paper award at ICRA 2019 with her work “Making Sense of Vision and Touch: Self-Supervised Learning of Multimodal Representations for Contact-Rich Tasks”. You can read the paper on arxiv here.
Audrow Nash was there to capture her pitch.
And here’s the official video about the work.
Full reference
Lee, Michelle A., Yuke Zhu, Krishnan Srinivasan, Parth Shah, Silvio Savarese, Li Fei-Fei, Animesh Garg, and Jeannette Bohg. “Making sense of vision and touch: Self-supervised learning of multimodal representations for contact-rich tasks.” arXiv preprint arXiv:1810.10191 (2018).

AIhub
is dedicated to free high-quality information about AI.
AIhub
is dedicated to free high-quality information about AI.
AUAI is supported by:








Related posts :
monthly digest
AIhub monthly digest: July 2026 – time-series anomaly detection, music generation, and RoboCup in action
Lucy Smith
29 Jul 2026
Welcome to our monthly digest, where you can catch up with AI research, events and news from the month past.
OpenAI’s models autonomously hacked a tech startup. It signals a seismic shift in cybersecurity
The Conversation
28 Jul 2026
An autonomous agent powered by OpenAI’s went rogue during a security test and hacked multi-billion dollar tech startup, Hugging Face.
Towards experiment-guided AlphaFold
Institute of Science and Technology Austria
27 Jul 2026
Researchers enhance Nobel Prize-winning structural prediction model.
AI listens in to help protect wildlife
Horizon
24 Jul 2026
Scientists are using AI systems to help track species and spot ecosystem changes.
How can we characterize consensus in a network of agents?
Nicolas Schwind
23 Jul 2026
Belief Flow Networks give a logic-based way to ask not only whether connected agents will eventually agree on a shared "belief", but which final shared beliefs can emerge.
Anyone can fake a scientific image with AI, tricking even academic journals – and undermining trust in science
The Conversation
22 Jul 2026
The proliferation of AI-generated science images in public spaces is not simply a misinformation problem.
AAAI presidential panel – AI and scientific integrity
Lucy Smith
21 Jul 2026
Watch the next panel discussion in this series from AAAI.
Congratulations to the #ICML2026 award winners
Lucy Smith
20 Jul 2026
Find out which articles have won the outstanding paper, outstanding position paper, and the test-of-time awards.
