
ΑΙhub.org
Think like a human: the present and future of logic for trustworthy rational robots
 Georgia Tech’s Golem Chesster playing chess at AAAI 2010. Image credit: Jiuguang Wang. Licence: CC BY-SA 3.0.
Georgia Tech’s Golem Chesster playing chess at AAAI 2010. Image credit: Jiuguang Wang. Licence: CC BY-SA 3.0.
Over the last decade, the use of robots in production and daily life has increased. Either for supporting workers in challenging tasks, or assisting elderly people and education, robots are no longer solely seen as tireless machines with outstanding motor skills, we also expect them to be intelligent. In fact, one crucial requirement for modern robotic systems is deliberation. Deliberation is a form of intelligence, consisting of “the ability to make decisions which are motivated by reasoning on the available resources, i.e., the capabilities of the robot, the actual description of the environment and the given mission” [1]. Deliberation is a concept from artificial intelligence (AI) which is related to human rationality. Imagine a game of chess. The mission goal is catching the opponent’s king. The available resources are the motion capabilities of different pieces on the board and the rules of the game. At each turn, a human gamer considers only these elements and the current configuration of pieces on the board, to devise the next move within a long-term strategy. Recently, learning-based algorithms as AlphaZero have mastered chess and other games [2], and they have also become popular for solving complex robotic tasks [3], but is it a reliable form of deliberation? Learning-based solutions are efficient, but are they trustworthy enough to be embedded in a robot cooperating with or assisting humans? This is, in fact, one crucial requirement for safety-risk autonomous systems, as prescribed by recent international regulations, e.g., by the EU [4].
Stemming from the concept of trustworthy and reliable deliberation, in our paper [5] we have surveyed trends and software tools for logic programming for robotics. Logic programming implements causal and temporal relations and concepts, and allows machine reasoning and deduction from them. For instance, in the game of chess, it is possible to easily express constraints as “the horse cannot move horizontally”, preconditions as “a piece can move to a cell if it is free”, or the goal “eventually catch the opponent king”. Logic programming has several key advantages over other AI algorithms for deliberation. First, the robotic problem is formalized according to the rational scheme of the human mind, in terms of goal, rules, preconditions and effects of actions, rather than black-box models and parameters typical of learning algorithms. This allows straightforward mapping to well-established paradigms for automation, e.g., the popular planning domain definition language widely adopted in industry [6]. Moreover, the input language and the output strategy for the robotic mission are expressed closely to natural language, enhancing comprehensible autonomy and allowing easier interface with humans. Finally, reasoning directly on mission specifications and the goal guarantees predictability of the computed strategy, and the simultaneous generation of multiple strategies for the same mission. This may allow humans to select the preferred strategy (e.g., in a production pipeline or for houseware automation) and maintain a supervisory role over the robotic system.
Logic programming dates back to the mid- 20th century, but our review has evidenced that its integration with robotic systems has significantly emerged only in the last two decades. This is due also to the recent development of efficient algorithms for satisfiability checking and proofing, which constitute the foundation for most deductive reasoners. Our research has evidenced three main aspects:
- Most established frameworks for logic programming in the robotic community can represent causal relations (e.g., effects and preconditions of actions), which are the most common class of specifications in the majority of robotic missions. Moreover, they support strategy optimization and runtime querying, which is essential in large domains where users are interested in retrieving useful information and only partial shorter strategies.
- Relevant robotic application domains for logic programming include houseware automation, multi-robot navigation, manufacturing, industrial manipulation and search & rescue scenarios.
- Temporal logic programming is preferred when combined high-level mission and low-level motion deliberation are needed, e.g., in complex multi-robot coordination scenarios.
In general, the synergy between AI, logic and robotics is rapidly growing, and the aim of our review is to further bridge the gap and serve as both a theoretical and practical guide for roboticists addressing the problem of trustworthy intelligence. Future research shall be devoted to addressing current limitations, mainly the computational burden of integrating logical deduction with probability theory. Reasoning about perceptual uncertainty is a crucial capability for robotic systems interacting with a complex environment in the presence of humans. There exist several papers addressing this issue [7], but more elegant and suitable solutions are focus of the research community (see, for example, our open special issue).
This work is part of, and has been financed by, the “Autonomous Robotic Surgery” European Project [8], in partnership with University of Verona and Caltech, with the goal to implement trustworthy autonomy in the operating room of the future. The highly safety-critical surgical scenario is the perfect setting to investigate not only deliberation, but also strictly connected topics such as learning mission logic from examples [9] and integration of logic programming with other robotic components [10] (see Figures 1 and 2). Our research team is focusing on these and other fundamental facets of next-generation cognitive robots.
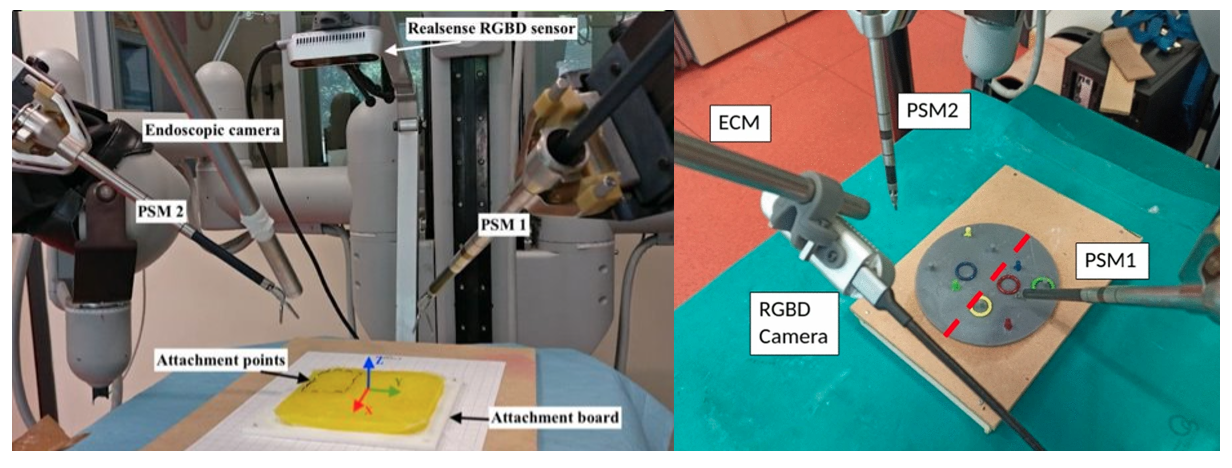 Figure 1: Setups for tissue manipulation (left) and peg transfer (right) for surgical robotic training.
Figure 1: Setups for tissue manipulation (left) and peg transfer (right) for surgical robotic training.
 Figure 2: Setup for semi-autonomous partial nefrectomy developed in Verona under the SARAS project.
Figure 2: Setup for semi-autonomous partial nefrectomy developed in Verona under the SARAS project.
References
[1] Ingrand, Félix, and Malik Ghallab. “Deliberation for autonomous robots: A survey.” Artificial Intelligence 247 (2017): 10-44.
[2] Silver, David, et al. “A general reinforcement learning algorithm that masters chess, shogi, and Go through self-play.” Science 362.6419 (2018): 1140-1144.
[3] Kober, Jens, J. Andrew Bagnell, and Jan Peters. “Reinforcement learning in robotics: A survey.” The International Journal of Robotics Research 32.11 (2013): 1238-1274.
[4] https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=CELEX:52021PC0206
[5] Meli, Daniele, Hirenkumar Nakawala, and Paolo Fiorini. “Logic programming for deliberative robotic task planning.” Artificial Intelligence Review (2023): 1-39.
[6] Wally, Bernhard, et al. “Production Planning with IEC 62264 and PDDL.” 2019 IEEE 17th international conference on industrial informatics (INDIN). Vol. 1. IEEE, 2019.
[7] Sridharan, Mohan, et al. “REBA: A refinement-based architecture for knowledge representation and reasoning in robotics.” Journal of Artificial Intelligence Research 65 (2019): 87-180.
[8] https://www.ars-project.eu/
[9] Meli, Daniele, Mohan Sridharan, and Paolo Fiorini. “Inductive learning of answer set programs for autonomous surgical task planning: Application to a training task for surgeons.” Machine Learning 110.7 (2021): 1739-1763.
[10] Tagliabue, Eleonora, Meli Daniele, et al. “Deliberation in autonomous robotic surgery: a framework for handling anatomical uncertainty.” 2022 International Conference on Robotics and Automation (ICRA). IEEE, 2022.

AUAI is supported by:








