
ΑΙhub.org
Introducing the NASA Onboard Artificial Intelligence Research (OnAIR) platform: an interview with Evana Gizzi
 Evana Gizzi at the Microsoft Global Hackathon. Image credit: Microsoft.
Evana Gizzi at the Microsoft Global Hackathon. Image credit: Microsoft.
The Thirty-Seventh Annual Conference on Innovative Applications of Artificial Intelligence (IAAI 2025), which took place alongside AAAI 2025, serves as a showcase for successful applications and novel uses of AI. One such application is the Onboard Artificial Intelligence Research (OnAIR) platform, introduced by Evana Gizzi and colleagues in their paper OnAIR: Applications of The NASA On-Board Artificial Intelligence Research Platform. This open-source software pipeline and cognitive architecture tool has been designed to aid space research and missions. We spoke to Evana, Artificial Intelligence Research Lead at NASA Goddard Space Flight Center, about the OnAIR platform, some of the particular challenges of deploying AI-based solutions in space, and how the tool has been used so far.
Could you start by giving us a quick introduction to the OnAIR tool?
OnAIR is an open-source software pipeline and cognitive architecture tool. The platform enables researchers to run the full life cycle of AI research for on-board intelligent systems. It’s written in Python, and based on Python plug-ins, and you can download it with just one click.
OnAIR is really simple to use and enables autonomy integration in space – we’ve already used it in a handful of Earth and space-based missions. Our goal is to reduce the barriers-to-entry of infusing AI into space systems, which can be pretty complex and unapproachable, and thus keep in evolution with the increasing technological needs of the space industry. Space is hard, but it doesn’t always need to be.
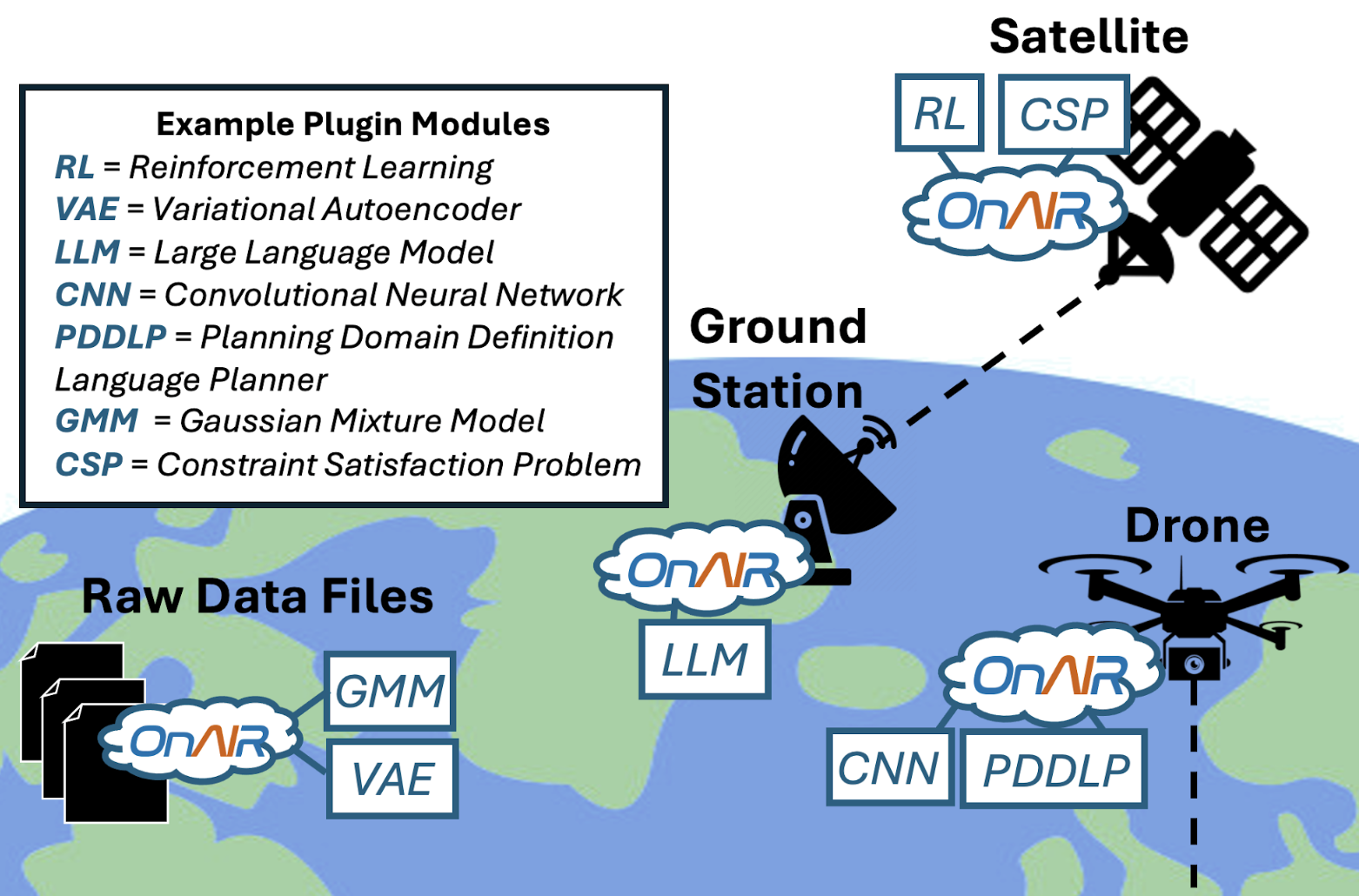 OnAIR can interoperate with a range of systems, and has been successfully integrated with flight software on-board satellites, drones, robots, data from ground stations, and using raw data files.
OnAIR can interoperate with a range of systems, and has been successfully integrated with flight software on-board satellites, drones, robots, data from ground stations, and using raw data files.
How does the aerospace sector differ from others in terms of application of AI?
The thing about the aerospace sector that’s different from other application areas is that it is a sensitive domain, and is really inaccessible – not only physically inaccessible, but also monetarily inaccessible. Materials, labor, process and launches cost a lot. Also, space technology typically lags behind the technology we see on Earth for a handful of reasons. For example, computers need to be radiation-hardened to deal with the harsh conditions in space, which affects size, weight and power requirements, resulting in computational limitations. Also, communication links can be really limiting with regard to bandwidth, latency and proximity, especially in deep space planetary environments. You’re not going to get any real-time data to the ground. These are the sorts of things we may take for granted with our computers and networks on the ground.
Another roadblock is that a lot of space systems don’t use modern and high-level languages like Python, which increases the learning curve and thus, accessibility, for AI applications which are typically implemented in these sorts of languages.
All of these things equate to one thing in my mind: doing agile development in space is really hard. And OnAIR makes that agility easier.
What are some of the benefits of the OnAIR platform?
One of the reasons this tool has been really beneficial is because it has been a great catalyst to get things moving quickly, without needing to download, learn, configure and run a convoluted flight software code base or giant, poorly maintained dataset. And in many cases, OnAIR has remained a perfectly usable solution from ideation to mission execution, throughout the entire mission life cycle. We built and maintain OnAIR with three tenants in mind: 1) It has to be generalizable (we don’t want it to just be for space, or specialized to a particular mission), 2) It has to be easy to use, 3) If it’s hard for even a software engineer to get it running, it’s completely useless.
Another benefit of using this tool is that it’s really helping to bridge the artificial intelligence and aerospace research communities, which can be pretty unapproachable from both sides – but there are exciting benefits at their intersection. Space, in general, has really, really hard problems that are super interesting, many of which necessitate autonomous capabilities. But there are a lot of roadblocks to get this sort of work started, many of which are actually culturally rooted – the aerospace sector has been traditionally risk averse, so introducing new technologies like AI can involve overcoming more of a cultural battle more than anything else; OnAIR has definitely broken down some of those aspects.
What inspired the development of OnAIR?
We originally had this tool developed just for our own benefit because we noticed we were making a lot of repeated architectural decisions. At the time, we were also working to support so many different kinds of stakeholders at NASA – planetary scientists, earth scientists, heliophysics, flight dynamics experts, instrument leads, chemical engineers – you name it. They all have such a variation in their experience level or understanding of AI and just coding in general. So we started developing and using OnAIR as a way to get a really diverse team to interoperate. And then, as we increased the maturity of our research applications, we brought OnAIR into the field with the drone flights and flight missions, and eventually realized that we didn’t really need much more than the tool.
In the paper you talk about applications, both in the research side and the deployment side. It would be really interesting to hear a bit more about that.
On the research side, what I really have been excited about is OnAIR’s ability to support the diversity of research that we get in the space sector. Because of its plug-in feature, OnAIR can be used with raw data, with simulators, with physical agents and with flight software. And all the while, OnAIR maintains a single consistent thread through that research maturation process. To date, OnAIR has been used to support research in a handful of domains, spanning snow water hydrology to heliophysics to discovering life on other planets.
For example, last summer our interns used OnAIR with Raspberry PIs and cameras to do contaminant detection in soil for agricultural applications. Other researchers used OnAIR to support anomaly detection in on-board satellite telemetry. What’s exciting about it for me is it’s just simple and easy to use. I don’t really like the complexity that we, as engineers, sometimes add for no reason. On the research side it’s been extremely approachable to all of our interns and research scientists.
What’s been exciting with the deployment side is that this tool is one of the first of its kind, which can generalize supporting autonomy applications across different missions, which makes it so you don’t need to reinvent the wheel every single time you fly a mission. Not only that, but if you know that the system is going to use OnAIR as a tool for the actual deployed solution, you can now do prototyping on your laptop with just sample CSV data to progress your algorithms.
Typically in aerospace you have to set up the whole flight software simulation environment, which is clunky, and takes time. Now that we have OnAIR, we’ve bypassed the need to do all those things, which makes things progress faster and it makes it more approachable to different research communities, private, public, and academic sectors.
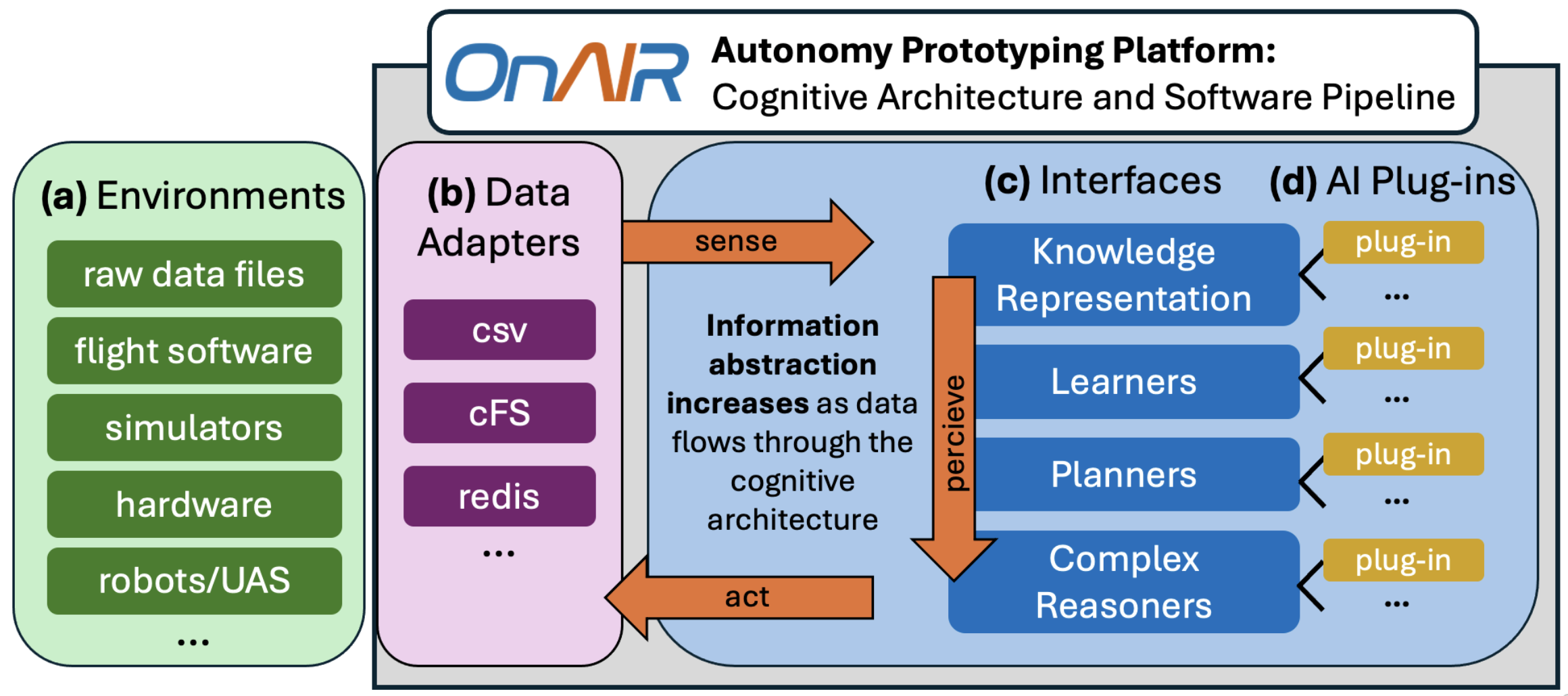 System diagram of OnAIR and its interaction with external environments.
System diagram of OnAIR and its interaction with external environments.
Have you got any future deployments coming up that you’d like to mention?
Our current line of research is demonstrating intelligent, extensible mission architectures in space. So the idea is you have multi-agent systems that can unexpectedly work together and OnAIR is being used as like the brain of those individual agents.
I’m most excited about our flight demonstration of intelligent extensible mission architectures coming up this year, in collaboration with NASA Johnson Space Center and NASA Ames Research Center. We’re putting OnAIR on board a satellite to do anomaly detection on star tracker data to assist with downlink communication limitation. In the case that an anomaly is identified using specialized machine learning algorithms within OnAIR, the satellite will send relevant information down to the ground for further investigation of the anomaly. What I am most proud of is that we delivered our entire hardware test environment and flight software code in just 1.5 months. I personally believe a large part of the research and deployment process was made faster due to using OnAIR as a tool.
We also have an upcoming field campaign planned for this summer, where we will be using OnAIR and intelligent extensible mission architectures to enable opportunistic science discovery using drones at a domestic field site here in the northeast region of the US. More on that another time.
Are you working on further improvements or modifications to the platform?
That’s a conversation we’ve had. We have a very narrow and specific purpose for OnAIR, which is to support rapid prototyping. We don’t want OnAIR to become so generalized that it’s doing the same thing that other publish-subscribe systems are doing, but also we don’t want it too specialized where it can’t be reused across the various research stages. There are a few improvements we are looking to make that are more functional as opposed to new features. One of them is to try to do some multi-threading with some of the plug-ins so they can run at the same time.
I think we’re really happy with where it’s at now, and we’re really just looking to use it in as many applications for science as possible at this point. There’s always maintenance you have to do, but we’re not planning any major feature overhauls. We hope to add more sample tutorial experiments online so people can have an easier time getting things started.
For me, as a researcher, it’s been cool to see how this tool is actually helping people as opposed to just being this theoretical tool that exists and doesn’t actually do much to help progress deployed systems.
About Evana

|
Dr. Evana Gizzi is an Artificial Intelligence Research Lead at NASA Goddard Space Flight Center (GSFC), where she serves as Principal Investigator of the Space Autonomy Research (SPAR) Lab, and Technical Lead of the ASTRA Project (Autonomous Science and Technology for Responsive Adaptability). Her work focuses on developing algorithms and tools to support opportunistic science discovery and resilient systems on Earth and in Space. Previously, Dr. Gizzi obtained her PhD in Artificial Intelligence from Tufts University, where she focused on creative problem solving in intelligent agents. |
Read the work in full
OnAIR: Applications of the NASA On-Board Artificial Intelligence Research Platform, Evana Gizzi, Timothy Chase Jr, Christian Cassamajor-Paul, Rachael Chertok, Lily Clough, Connor Firth, Alan Gibson, Ibrahim Haroon, James Marshall, Patrick Maynard, Michael Monaghan, Hayley Owens, Daniel Rogers, Mahmooda Sultana, Jivko Sinapov, Bethany Theiling.
tags: AAAI, AAAI2025, IAAI2025

AUAI is supported by:








