
ΑΙhub.org
#IJCAI2021 invited talks round-up 1: fairness in multiwinner voting, and combining AI and robotics to augment human abilities
 Photo by Element5 Digital on Unsplash
Photo by Element5 Digital on Unsplash
There is an exciting, and varied, programme of eight invited talks at the International Joint Conference on Artificial Intelligence (IJCAI-21) this year. On the opening day of the conference, we heard presentations from Edith Elkind (University of Oxford), who talked about fairness in multiwinner voting, and Masahiro Fujita (SonyAI) who discussed combining AI and robotics for augmenting human abilities.
Edith Elkind – Fairness in multiwinner voting
Edith works in algorithmic game theory, with a focus on algorithms for collective decision making and coalition formation. She began by giving a brief overview of the field of computational social choice. This area of research, at the interface of social choice theory and computer science, really began in earnest following COMSOC ’06, the first International Workshop on Computational Social Choice.
The field considers analysis of problems arising from the aggregation of preferences of a group of agents. Of particular concern are the computation of voting rules, issues such as representing and eliciting preferences, and study of the various forms of manipulation.
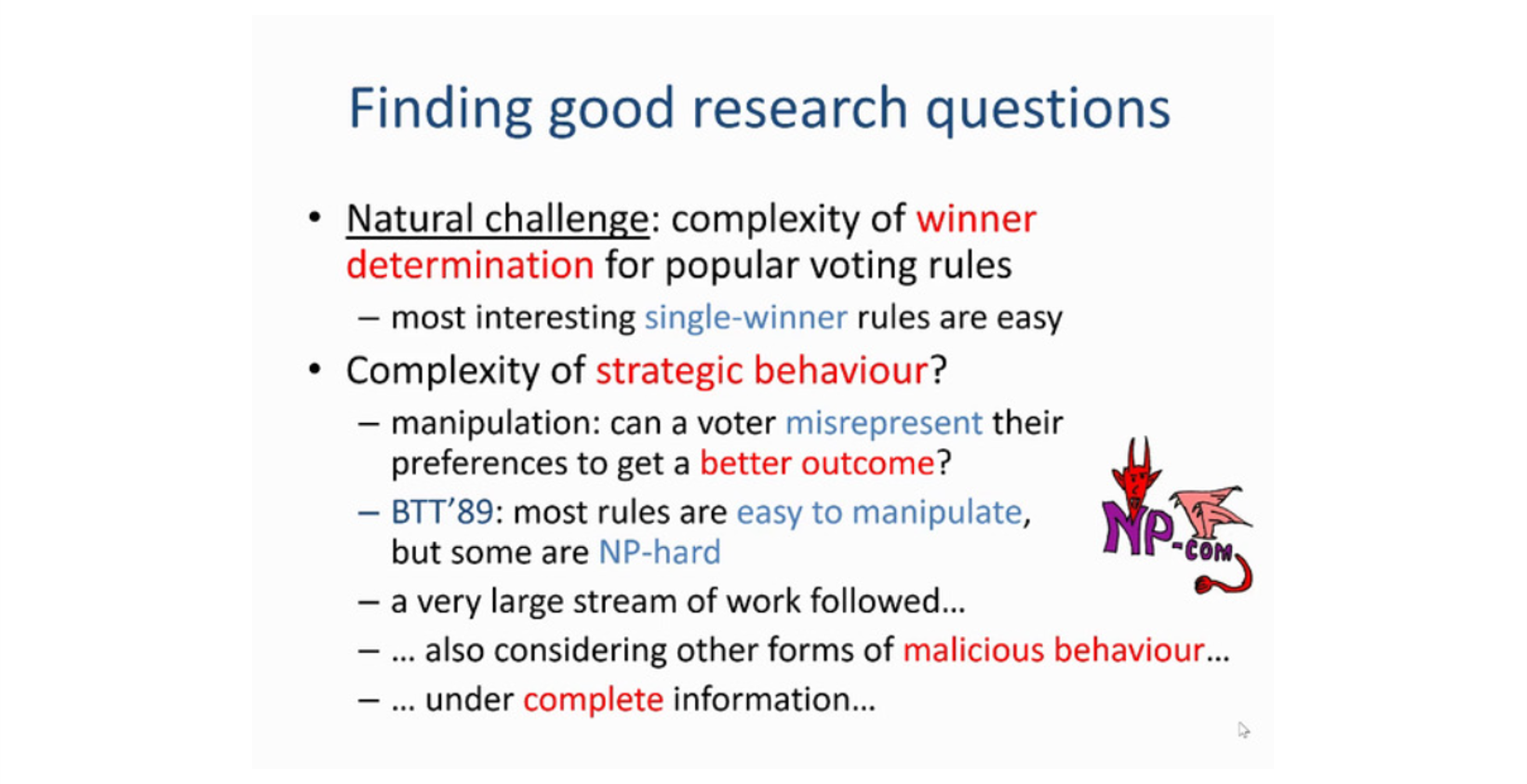 Finding good research questions. Some of the topics that have been studied by researchers. Slide from Edith’s talk.
Finding good research questions. Some of the topics that have been studied by researchers. Slide from Edith’s talk.
Edith provided a summary of some of the different topics that have been considered in the field. One very interesting problem is multiwinner voting. Multiwinner voting is a system in which the goal is to select not just one, but multiple candidates. Examples of this kind of voting system include shortlisting candidates for a job position, choosing which food to order for a banquet, or choosing a selection of films to show on a plane.
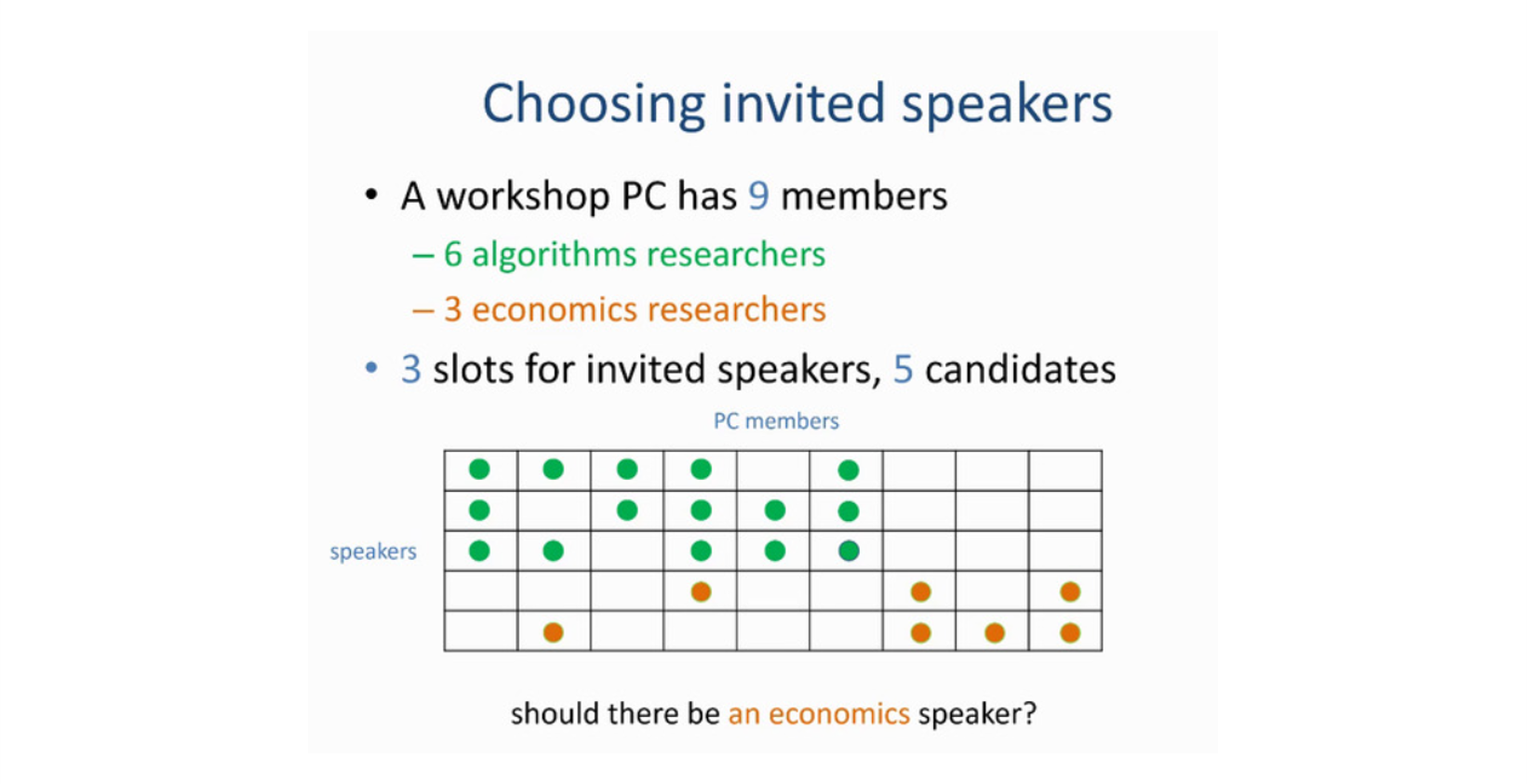 The multiwinner voting scenario used as an example. Slide from Edith’s talk.
The multiwinner voting scenario used as an example. Slide from Edith’s talk.
By way of a worked example, Edith demonstrated the interplay between complexity and axiomatic analysis in the domain of multiwinner voting. The example (illustrated above) considered the organisation of a multidisciplinary workshop with a programme committee of nine members (six algorithmic researchers and three economics researchers). There are three slots for invited talks and five possible candidates. With one group having more members on the committee, the task is to develop a method to ensure fair representation in terms of invited speakers. Edith described the various algorithms that have been used to achieve this, their pros and cons, and how they can be used to maximise, what is known as, extended justified representation. In other words, what would be the best choice of invited speakers to ensure fair, and representative, subject coverage?
If you are interested in finding out more, here are some of the papers that Edith mentioned during her talk:
Justified Representation in Approval-Based Committee Voting, Haris Aziz, Markus Brill, Vincent Conitzer, Edith Elkind, Rupert Freeman, Toby Walsh.
On the Complexity of Extended and Proportional Justified Representation, Haris Aziz, Edith Elkind, Shenwei Huang, Martin Lackner, Luis Sánchez-Fernández, Piotr Skowron.
Proportionality and the Limits of Welfarism, Dominik Peters, Piotr Skowron.
Masahiro Fujita – AI and robotics for activating and augmenting human abilities
In his talk, Masahiro considered four research topics. In all cases, the objective is that robots/AI and humans work together with the aim of enhancing human experience, ability or creativity.
- Eliciting human response: how robots draw emotions and reactions from humans.
- Enhancing human activities: using remote operation to grow scope of human tasks.
- Augmenting human skills: improving precision and delicacy in human tasks.
- Activating human creativity: how to unleash human imagination and creativity.
Eliciting human response. Masahiro demonstrated some of the social robots that Sony have produced over the years, particularly focusing on the evolution of the robotic dog, AIBO. He showed results from research into their use to aid patients, where such robot companions can improve the emotional well-being of people.
Enhancing human activities. This section of the talk focused on how semi-autonomous robots can be used to assist humans in a variety of settings. One nice example involved a robot in a care setting where a patient was unable to walk. In the demonstration video, the patient could communicate with the semi-autonomous robot via a tablet, and, in this case, asked for a towel to be brought to them. Cameras fitted to the robot, with images relayed back to the tablet, enabled the human to provide instruction to the robot as to the exact location of the towel in the room, which could then be grabbed and retrieved by the robot.
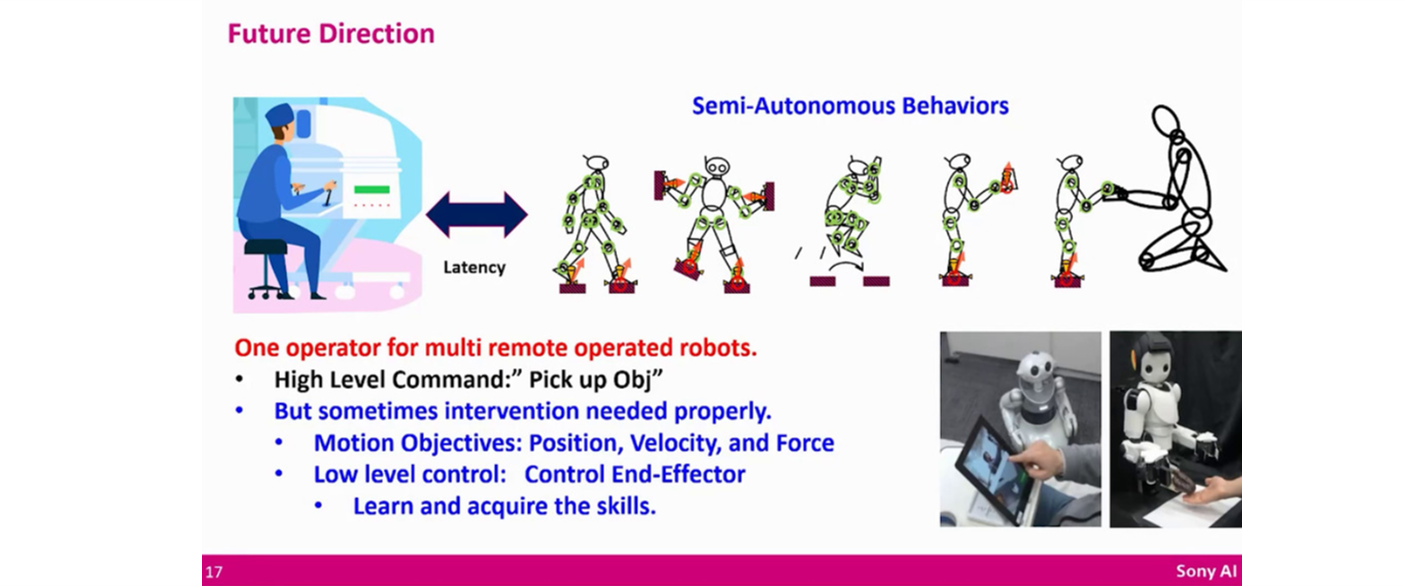 Future directions for research into semi-autonomous robots to enhance human activites. Slide from Masahiro’s talk.
Future directions for research into semi-autonomous robots to enhance human activites. Slide from Masahiro’s talk.
Augmenting human skills. On this topic, Masahiro talked about how semi-autonomous robotic systems could be used in high precision tasks, such as grasping very small objects. An area for application could be in a medical setting, where super-human manipulation skills in surgery would be advantageous. The idea is that a human operates a system at their location and, through a control system, their movements are mirrored at increased (ten-fold) precision by the robot in its setting. The team’s target is to develop a robot that has 10 micron precision. A video demonstration showed a robotic grasper picking up objects as small as 0.2mm.
This system could also be used in reverse by scaling up ten-fold to large-scale environments, such as construction settings.
Activating human creativity. In this section of the presentation, Masahiro used gastronomy as an example of how AI can enhance human creativity. One challenge that he and his team are considering is using AI methods for new recipe creation. In particular, the idea food pairing – the study of which ingredients go well together based on their shared flavour compounds. His team developed FlavorGraph: a large-scale food-chemical graph for generating food representations and recommending food pairings. The dataset used for training consisted of around 6,600 ingredients and 1,500 chemical compounds extracted from over one million recipes.
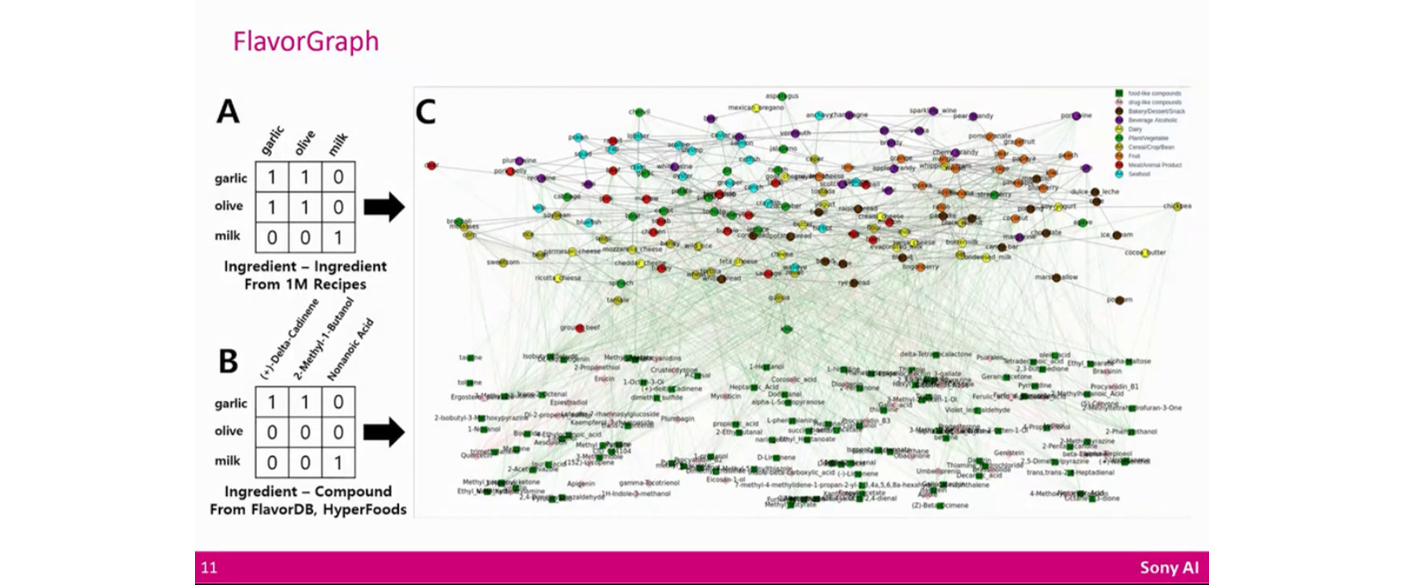 FlavorGraph results. Graphical representation of ingredients and their suitability as pairings based on shared flavour compounds. Slide from Masahiro’s talk.
FlavorGraph results. Graphical representation of ingredients and their suitability as pairings based on shared flavour compounds. Slide from Masahiro’s talk.
If you are interested in finding out more, here are some of the papers that Masahiro mentioned during his talk:
On activating human communications with pet-type robot AIBO, Masahiro Fujita.
Motion control of a virtual humanoid that can perform real physical interactions with a human, Ken’ichiro Nagasaka, Atsushi Miyamoto, Masakuni Nagano, Hirokazu Shirado, Tetsuharu Fukushima and Masahiro Fujita.
Development and Testing of Force-Sensing Forceps Using FBG for Bilateral Micro-Operation System, Hiroyuki Suzuki, Hiromasa Masuda, Kazuo Hongo, Ryuta Horie, Shunsuke Yajima, Yuki Itotani, Masahiro Fujita and Kenichiro Nagasaka.
FlavorGraph: a large-scale food-chemical graph for generating food representations and recommending food pairings, Donghyeon Park, Keonwoo Kim, Seoyoon Kim, Michael Spranger and Jaewoo Kang.
tags: IJCAI2021

AUAI is supported by:








