
ΑΙhub.org
AIhub blog post highlights 2022

Over the course of the year, we’ve had the pleasure of working with many great researchers from across the globe. As 2022 draws to a close, we take a look back at some of our favourite blog posts from our contributors.
AI system for live music accompaniment and improvisation
Olga Vechtomova and Gaurav Sahu envisioned and developed a system, LyricJam Sonic, that uses AI to create a real-time generative stream of music based on an artist’s own catalogue of studio recordings. The purpose is to inspire the artist from potentially unexpected combinations of sounds.
Algorithmically finding ways to synthesize new medicine
Christopher Franz and Kevin Schewior write about how they applied a well-known algorithm for solving two-player games to the problem of synthesizing new molecules. This is work that won them, and co-authors Georg Mogk and Thomas Mrziglod, a distinguished paper award at IJCAI2022.
Benchmarking quality-diversity algorithms on neuroevolution for reinforcement learning

Manon Flageat, Bryan Lim, Luca Grillotti, Maxime Allard, Simón C. Smith and Antoine Cully develop learning algorithms known as Quality-Diversity algorithms. In this blog post, Manon and Bryan write about the team’s work that proposes applying QD to deep reinforcement learning tasks.
#IJCAI2022 distinguished paper – Plurality veto: A simple voting rule achieving optimal metric distortion
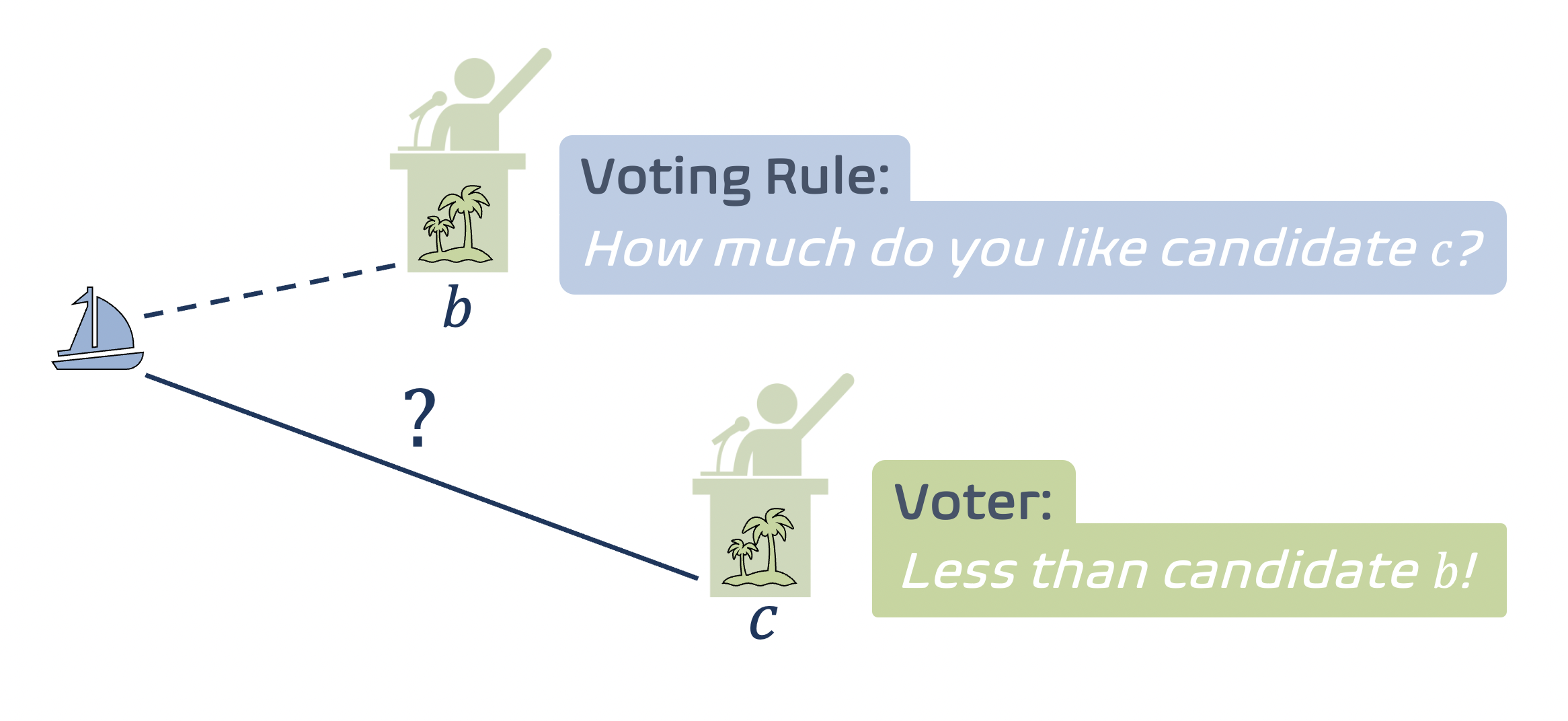
Fatih Erdem Kizilkaya and David Kempe won a distinguished paper award at IJCAI-ECAI 2022 for their work which considers the problem of creating a voting system that best represents the preferences of the voters. In this blog post, Fatih explains their method by means of simple examples.
Accelerating laboratory automation through robot skill learning
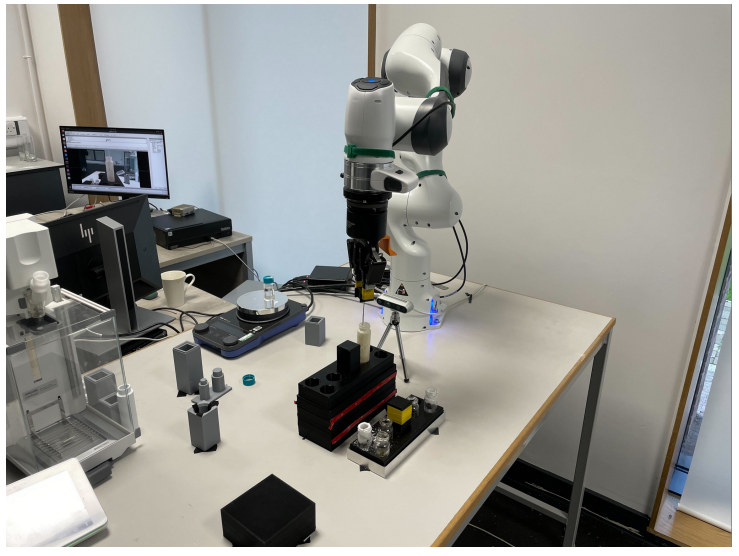
In robotics, reinforcement learning has become a compelling tool for robots to autonomously acquire behaviours and skills. In this blog post, Gabriella Pizzuto writes about her work on introducing model-free reinforcement learning to the laboratory task of sample scraping.
Developing safe controllers for autonomous systems under uncertainty
Thom Badings and Nils Jansen write about their work on controllers for autonomous systems that won them, and co-authors Alessandro Abate, David Parker, Hasan Poonawala, and Marielle Stoelinga, a distinguished paper award at AAAI 2022. They propose a method to compute safe controllers for autonomous systems in safety-critical settings under unknown stochastic noise.
State of the art in the RoboCup Humanoid League

RoboCup is an international scientific initiative with the goal of advancing the state of the art of intelligent robots, AI and automation. Jasper Güldenstein and Marc Bestmann summarised the technical details of the hardware and software used in the humanoid league in this year’s competition.
Estimating manipulation intentions to ease teleoperation

Anna Belardinelli writes about her work on estimating manipulation intention to ease teleoperation. Anna and colleagues have introduced an intention estimation model that relies on both gaze and motion features.
Practical complexity of optimal play in games for two
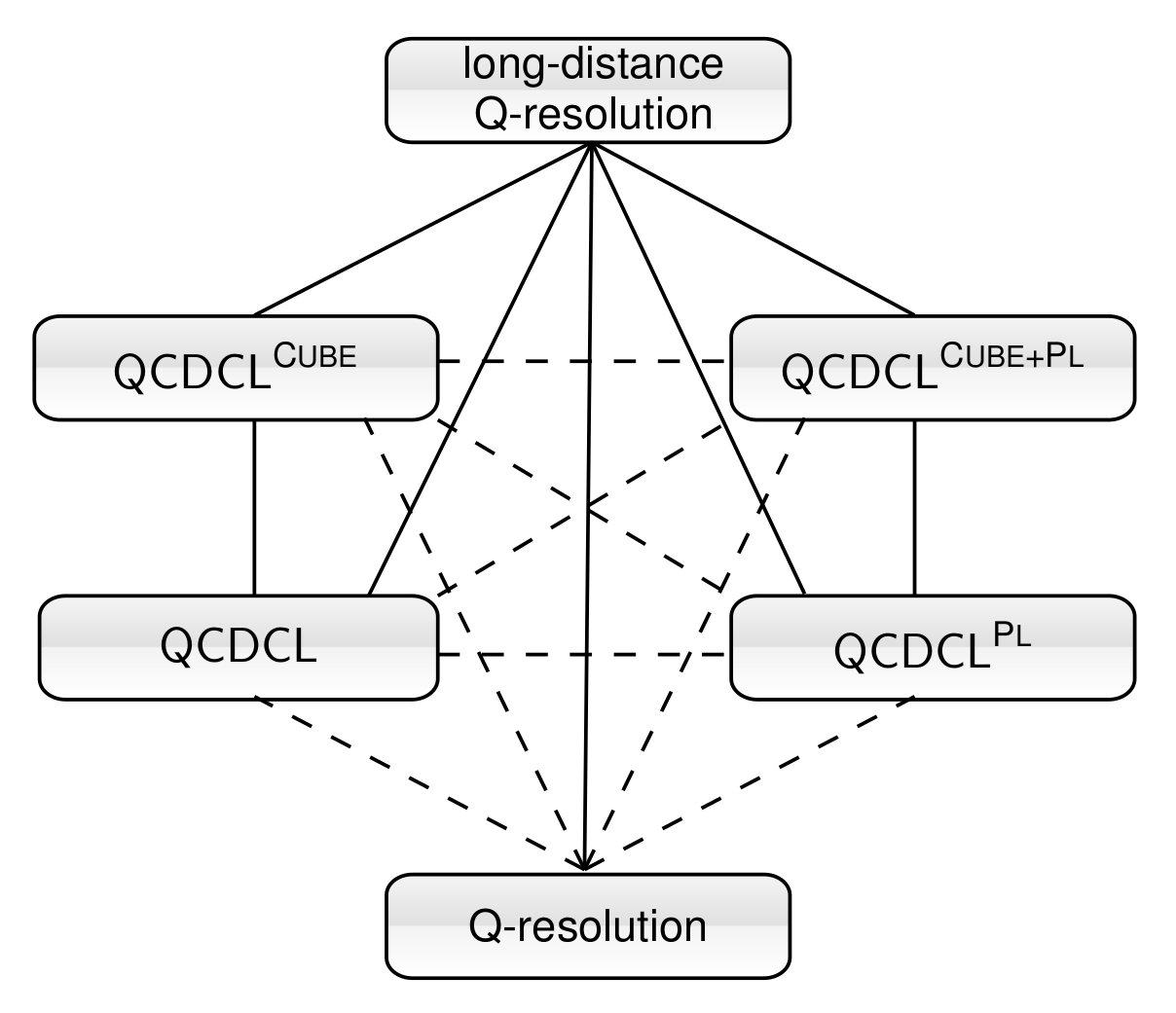
Benjamin Böhm, Tomáš Peitl and Olaf Beyersdorff won an IJCAI 2022 distinguished paper award for their article “QCDCL with Cube Learning or Pure Literal Elimination – What is Best?”. In this blog post, they explain their work, in which they study the reasoning power of various algorithms that decide two-player games.

AUAI is supported by:








